5. Faults
Contents FAULT GEOMETRIES AND DISPLACEMENT Geometric Classification of Fault Arrays FAULT DIMENSIONS AND TERMINATIONS Fault Dimensions and Self-Similarity Slickensides and Slip Lineations
|
 |
INTRODUCTION
Imagine a miner in a cramped tunnel crunching forward through a thick seam of coal. Suddenly, his pick hits hard rock. The miner chips away a bit more only to find that the seam that he’s been following for the past three weeks abruptly terminates against a wall of sandstone. He says, “@%$&, my seam’s cut off— there’s a fault with it!” From previous experience, the miner knows that because of a fault, he will have to spend precious time digging a shaft up or down to intersect the coal seam again.
|
|
|
FIGURE 5.1. Sketches illustrating differences between faults, fault zones, and shear zones. (a) Fault. (b) Fault zone, with inset showing cataclastic deformation adjacent to the fault surface. (c) Sketch illustrating the relation between a principal fault and fault splays. (d) Anastomosing faults in a fault zone. (e) A shear zone, showing rock continuity across the zone. The displacements are shown to intersect the ground surface, whereas the shear zone occurs at depth in the crust. [8.1] |

Geologists adopted the term fault, but they use the term in different ways in different contexts. In a general sense, a fault is any surface or zone in the Earth across which measurable slip (shear displacement) develops. In a more restricted sense, faults are fractures on which slip develops primarily by brittle deformation processes (Figure 5.1a). This second definition serves to distinguish a “fault” (sensu stricto) from a fault zone and shear zone. We use the term fault zone for brittle structures in which loss of cohesion and slip occurs on several faults within a band of definable width (Figure 5.1b). Displacement in fault zones can involve formation and slip on many small, subparallel brittle faults, or slip on a principal fault from which many smaller faults diverge (fault splays), or slip on an anastomosing array of faults (Figure 5.1c and d). Shear zones are ductile structures, across which a rock body does not lose mesoscopic cohesion, so that strain is distributed across a band of definable width. In ductile shear zones, rocks deform by cataclasis, a process involving fracturing, crushing, and frictional sliding of grains or rock fragments, or, more commonly, by crystal plastic deformation mechanisms (Figure 5.1e).
|
|
|
|
|
F I G U R E 5.2 Photos of faults at different scales. (a) Microscopic faults, showing fractured and displaced feldspar grains. (b) Mesoscopic faults cutting thin layers in an outcrop. (c) Trace of the right-lateral San Andreas Fault offsetting Wallace Creek (CA); GE: 35°16'12.98" N 119°49'38.08" W. [8.2] |



Faults occur on all scales (Figure 5.2), and geologists study them for several reasons. They control the spatial arrangement of rock units, so their presence creates puzzles that challenge even the most experienced geologic mappers. Faults affect topography and modify the landscape. Faults affect the distribution of economic resources (e.g., oil fields and ore bodies). They control the permeability of rocks and sediments, properties which, in turn, control fluid migration. Faulting creates deformation (strain ± rotation ± translation) in the lithosphere during plate interactions and intraplate movements. And, faulting may cause devastating earthquakes.
Fault analysis, therefore, plays a major role in diverse aspects of both academic and applied geology. In order to provide a basis for working with faults, this chapter introduces the terminology that is used to describe fault geometry and displacement, it discusses how to represent faults on maps and cross sections, and shows you how to recognize and interpret faults at the surface and in the subsurface. We conclude by introducing fault-system tectonics, the relation between faulting and resources, and the relation between faulting and earthquakes. Much of our discussion in this chapter focuses on the properties of mesoscopic faults; we treat the large-scale properties of fault systems more fully in later chapters.
FAULT GEOMETRIES AND DISPLACEMENT
Basic Vocabulary
In order to discuss faults, we first need to introduce some fault vocabulary. To simplify our discussion, we treat a fault as a geometric surface in a body of rock. Rock adjacent to a fault surface is the wall of the fault, and the body of rock that moved as a consequence of slip on the fault is a fault block. If the fault is not vertical, you can distinguish between the hanging-wall, which is the rock body above the fault plane, and the footwall, which is the rock body below the fault plane (Figure 5.1a). This means that you cannot distinguish between a hanging wall and a footwall for a vertical fault.
To describe the attitude of a fault precisely, we measure the strike and dip (or dip and dip direction) of the fault. Commonly, geologists use adjectives such as steep, shallow, vertical, and so on, to convey an approximate image of fault dip. Keep in mind that a fault is not necessarily a perfectly planar surface; it may curve and change attitude along strike and/or up and down dip. Where such changes occur, a single strike and dip is not sufficient to describe the attitude of the whole fault, and you should provide separate measurements for distinct segments of the fault. Faults whose dip decreases progressively with depth have been given the special name listric faults.
|
|
FIGURE 5.3. Block diagram sketch showing the net-slip vector with its strike-slip and dip-slip components, as well as the rake and rake angle. [8.3] |

When fault movement occurs, one fault block slides relative to the other, which is described by the net slip. You can completely describe displacement by specifying the net-slip vector, which connects two formerly adjacent points that are now on opposite walls of the fault (Figure 5.3). To describe a net-slip vector, you must specify its magnitude and orientation (plunge and bearing, or rake on a plane), and the sense of slip (or shear sense). Shear sense defines the relative displacement of one wall of the fault with respect to the other wall; that is, whether one wall went up or down, and/or to the left or right of the other wall.
Like any vector, the net-slip vector can be divided into components. Generally we use the strike and dip of the fault as a reference frame for defining these components. Specifically, you measure the dip-slip component of net slip in the direction parallel to the dip direction, and the strike-slip component of net slip in the direction parallel to the strike. If the net-slip vector parallels the dip direction of the fault (within ∼10°), the fault is called a dip-slip fault; if the vector roughly parallels the strike of the fault, the fault is called a strike-slip fault. If the vector is not parallel to either dip direction of the strike, we call the fault an oblique-slip fault. As you can see in Figure 5.3, oblique-slip faults have both a strike-slip and a dip-slip component of movement.
|
|
|
|
FIGURE 5.4. Schematic block diagrams of the different types of faults. [8.4] |
|


We describe the shear sense on a dip-slip fault with reference to a horizontal line on the fault, by saying that the movement is hanging-wall up or hangingwall down relative to the footwall. Hanging-wall down faults are called normal faults, and hanging-wall up faults are called reverse faults (Figure 5.4a and b). To define sense of slip on strike-slip faults, imagine that you are standing on one side of the fault and are looking across the fault to the other side. If the opposite wall of the fault moves to your right, the fault is right-lateral (or dextral), and if the opposite wall of the fault moves to your left, the fault is left-lateral (or sinistral; Figure 5.4c and d). Note that this displacement does not depend on which side of the fault you are standing on. Finally, we define shear sense on an oblique-slip fault by specifying whether the dip-slip component of movement is hanging-wall up or down, and whether the strike-slip component is right-lateral or left-lateral (Figure 8.4e–h). Commonly, an additional distinction among fault types is made by adding reference to the dip angle of the fault surface; we recognize high-angle (>60° dip), intermediate-angle (30° to 60° dip), and low-angle faults (<30° dip). We provide more descriptions of the fault types in Supplementary Materials, along with descriptions of other commonly used names (such as thrust and detachment).
You may be wondering where the terms “normal” and “reverse” come from. Perhaps normal faults were thought to be “normal” because the hanging-wall block appeared to have slipped down the fault plane, just like a person slips down a slide. It is a safe guess that geologists came up with the name “reverse fault” to describe faults that are the opposite of normal. Now you know!
|
|
FIGURE 5.5. Extensional and contractional faulting. (a) Starting condition, (b) extension, and (c) contraction. Note the respective horizontal length changes. [8.5] |

We also distinguish among faults on the basis of whether they cause shortening or lengthening of the layers that are cut. Imagine that a fault cuts and displaces a horizontal bed marked with points X and Y (Figure 5.5a). Before movement, X and Y project to points A and B on an imaginary plane above the bedding plane. If the hanging wall moves down, then points X and Y project to A and B′. The length AB′ is greater than the length AB (Figure 5.5b). In other words, movement on this fault effectively lengthens the layer. We call a fault which results in lengthening of a layer an extensional fault. By contrast, the faulting shown in Figure 5.5c resulted in a decrease in the distance between points X and Y (AB > AB″). We call a fault which results in shortening of a body of rock a contractional fault. Contractional faults result in duplication of section, as measured along a line that crosses the fault and is perpendicular to stratigraphic boundaries, whereas extensional faults result in loss of section. Generally, one can use the term “normal fault” as a synonym for an extensional fault, and the term “reverse fault” as synonym for contractional faults. But such usage is not always correct. Consider a normal fault that rotates during later deformation. In outcrop, this fault may have the orientation and sense of slip you would expect on a reverse fault, but, in fact, its displacement produced extensional strain parallel to layering.
FAULT SYSTEMS
Faults typically do not occur in isolation, but rather are part of a group of associated faults that develop during the same interval of deformation and in response to the same regional stress field. We classify groups of related faults either by their geometric arrangement or their tectonic significance (i.e., the type of regional deformation resulting from their movement). A group of related faults is called a fault system or fault array. Although the terms “system” and “array” can be used interchangeably, geologists commonly use array when talking about geometric classifications and system in the context of tectonic classifications. As we continue, we’ll first describe a geometric classification for fault arrays, and then we’ll introduce the three tectonically defined types of fault systems: normal, thrust, and strike-slip systems. In many areas, faults in normal and thrust systems merge with a detachment in sedimentary rocks at shallow depth (10–15 km), in which case the system may be referred to as a thin-skinned system. If faulting involves deeper crustal rocks (i.e., basement), we call this a thick-skinned system. Most mountain belts show a transition between thin- and thick-skinned systems, so these are not adequate indicators of the tectonic setting.
Geometric Classification of Fault Arrays
Groups of faults may be classified as parallel, anastomosing, en echelon, relay, conjugate, or random arrays, depending on the relationships among faults in the array, and on how the faults link with one another along strike. We briefly define these terms below and they are illustrated in Figure 5.6.
|
|
|
|
FIGURE 5.6. Map-view sketches of various types of fault arrays. (a) Parallel array, (b) anastomosing array, (c) en echelon or stepped array, (d) relay array, (e) conjugate array, and (f) random array. See descriptions below. [8.31] |
|


Parallel fault array As the name suggests, a parallel fault array includes a number of fault surfaces that roughly parallel one another.
Anastomosing arrayA group of wavy faults that merge and diverge along strike, thereby creating a braided pattern in map view or cross section.
En echelon array A group of parallel fault segments that lie between two enveloping surfaces and are inclined at an angle to the enveloping surfaces.
Relay arrayIn map view, a relay array is a group of parallel or subparallel non-coplanar faults that are spaced at a distance from one another across strike, but whose traces overlap with one another along strike. As displacement dies out along the strike of one fault in the array, displacement increases along an adjacent fault. Thus, displacement is effectively “relayed” (transferred) from fault to fault. In a thrust belt containing a relay array of faults, regional shortening can be constant along the strike of the belt, even though the magnitude of displacement along individual faults dies out along strike.
Conjugate fault array An array composed of two sets of faults that are inclined to one another at an angle of about 60°. Conjugate fault arrays can consist of dip-slip faults or strike-slip faults. If the faults in the array are strike-slip, then one set must be dextral and the other sinistral.
Nonsystematic fault arrayIn some locations, faulting occurs on preexisting fractures. If the fracture array initially had a wide range of orientations, then slip on the fractures will yield faults in a wide range of orientations. Such an array is called a nonsystematic array.
Typically, faults in parallel arrays of normal or thrust faults dip in the same direction over a broad region. Subsidiary faults in the array that parallel the major faults are called synthetic faults, whereas subsidiary faults whose dip is opposite to that of the major faults are called antithetic faults.
Normal Fault Systems
Regional normal fault systems form in rifts, which are belts in which the lithosphere is undergoing extension; along passive margins, which are continental margins that are not currently plate margins; and along ocean ridges. Typically, faults in a normal fault system comprise relay or parallel arrays; they can be listric or planar, or contain distinct fault bends. Movement on both planar and listric normal fault systems generally results in rotation of hanging-wall blocks around a horizontal axis, and therefore causes tilting of overlying fault blocks and/or formation of rollover anticlines and synclines. The geometry of tilted blocks and rollover folds developed over normal faults depends on the shape of the fault and on whether or not synthetic or antithetic faults cut the hanging-wall block.
|
|
FIGURE 5.7. Normal fault systems. (a) Half-graben system. (b) Horst-and-graben system. [8.32] |

As a consequence of the rotation accompanying displacement on a normal fault, the original top surface of the hanging-wall block tilts toward the fault to create a depression called a half graben (Figure 5.7a). Note that a half graben (from the German word for “trough”) is bounded by a fault on only one side. Most of the basins in the Basin and Range Province of the western United States are half grabens, and the ranges consist of the exposed tips of tilted fault blocks. In places where two adjacent normal faults dip toward one another, the fault-bounded block between them drops down, creating a graben (Figure 5.7b). Where two adjacent normal faults dip away from one another, the relatively high footwall block between the faults is called a horst. Horsts and grabens commonly form because of the interaction between synthetic and antithetic faults in rift systems.
Reverse Fault Systems
Reverse fault systems are commonly arrays of thrust faults that form to accommodate large regional shortening. Not surprisingly, thrust systems are common along the margins of convergent plate boundaries and in collisional orogens. In such tectonic settings, thrusting occurs in conjunction with formation of folds, resulting in tectonic provinces called fold-thrust belts.
|
|
FIGURE 5.8. Reverse fault systems. (a) Imbricate fan in thrust system. (b) Duplex system with horses in between the floor and roof thrusts. [8.33] |


To a first approximation, fold-thrust belts resemble the wedge of snow or sand that is scraped off by a plow (Figure 5.8a). Typically, the numerous thrusts in a fold-thrust belt merge at depth with a shallowly dipping detachment. At a crustal scale, major thrust faults are listric; but in detail, where thrusts cut upwards through sequences of contrasting strata, they have a stair-step profile, with flats following weak horizons and ramps cutting across beds. Ramp-flat geometries generally develop best in sequences of well-stratified sedimentary rock, such as at passive margins caught in between colliding continents, or in the sequence of sediment on the craton side of the orogen that is derived by erosion of the evolving orogen, called a foreland basin.
As is the case with normal fault systems, faults in a thrust-fault system tend to comprise relay or parallel arrays. An imbricate fan of thrust faults (Figure 5.8a) consists of thrusts that either intersect the ground surface or die out up dip, whereas a duplex (Figure 5.8b) consists of thrusts that span the interval of rock between a higher-level detachment called a roof thrust and a lower level detachment called a floor thrust. We can’t say much more about thrust systems without introducing a lot of new terminology, so we’ll delay further discussion until later in this chapter.
Strike-Slip Fault Systems
|
|
FIGURE 5.9. The formation of a (positive) flower structure from strike-slip faulting. The symbols x and · indicate motion away and toward an observer, respectively. [8.34] |

Strike-slip fault systems occur at transform boundaries, which are boundaries where two plates slide past one another without the creation or subduction of lithosphere; they can also occur within plates and as components of convergent orogens. Major continental strike-slip fault systems are complicated structures. We have already explored several associated structures of regional strike-slip faults. Typically, they splay into many separate faults in the near surface, which, in cross section, resembles the head of a flower. Because of this geometry, such arrays are called flower structures (Figure 5.9).
Inversion of Fault Systems
Once formed, a fault is a material discontinuity that may remain weaker than surrounding regions for long periods of geologic time. Thus, faults can be reactivated during successive pulses of deformation at different times during an area’s history. If the stress field during successive pulses is different, the kinematics of movement on the fault may not be the same, and the resulting displacement from one event may be opposite to the displacement resulting from another event. For example, a normal fault formed during rifting of a continental margin may be reactivated as a thrust fault if that margin is later caught in the vice of continental collision. Likewise, the border faults of a half graben or failed rift may be reactivated later as thrust, or as strike-slip faults, if the region is later subject to compression. This reversal of displacement on a fault or fault system is called fault inversion. When inversion results in contraction of a previously formed basin, the process is called basin inversion.
FAULT BENDS
Fault surfaces are not necessarily planar. It is quite common, in fact, for the attitude of a fault to change down dip or along strike. If the dip and/or strike of a fault abruptly changes, the location of the change is called a fault bend. In some cases, the change is gradual. For example, the dip of “down-to-Gulf” faults (see Chapter 1) along the coastal plain of Texas typically decreases with depth, so that the fault overall has a concave-up shape making these structures listric faults. Other faults have wavy traces because their attitude changes back and forth.
Dip-Slip Faults
Dip slip faults that cut across a stratigraphic sequence in which layers have different mechanical properties typically contain numerous stratigraphically controlled bends that make the trace of the fault in cross section resemble a staircase. Some fault segments run parallel to bedding, called flats, and some cut across bedding, called ramps (Figure 5.10a).
|
|
FIGURE 5.10. (a) Cross section showing the geometry of ramps and flats along a thrust fault. The fault geometry is shown prior to displacement on the fault. (b) Cross section illustrating hanging-wall and footwall flats and ramps. Segment AB is a hanging-wall flat on a footwall flat. Segment BC is a hanging-wall flat on a footwall ramp. Segment CD is a hangingwall ramp on a footwall flat, and segment DE is a hanging-wall flat on a footwall flat. [8.11] |

If the fault has not been folded subsequent to its formation, flats are (sub)horizontal, whereas ramps have dips of about 30° to 45°. Note that, as shown in Figure 5.10b, a segment of a fault may parallel bedding in the footwall, but cut across bedding in the hanging wall. Thus, when describing stairstep faults in a stratified sequence you need to specify whether a fault segment is a ramp or flat with respect to the strata of the hanging wall, footwall, or both.
Let’s examine the relationships among ramps and flats in a thrust system, both before and after slip, in a bit more detail in the geometry below, which is flipped from that in Fig. 5.10.
|
|
FIGURE 5.11. When a thrust sheet moves up a stair-step fault, ramp anticlines develop. (a) The cross-sectional trace of the fault before slip. Points at the tops and bottoms of ramps are labeled. (b) The cross-sectional trace of the fault after slip. Note that the number of hanging-wall ramps exactly matches the number of footwall ramps. [18.9] |

Figure 5.11a shows the trace of a stair-step thrust fault before movement has taken place. Before movement, hanging-wall ramps must lie adjacent to footwall ramps, and hanging-wall flats must lie adjacent to footwall flats. Thus, the number of hanging-wall flats and ramps exactly matches the number of footwall flats and ramps. After slip (Figure 5.11b), the hangingwall block moves, so a hanging-wall ramp may end up on a footwall flat, and a hanging-wall flat may end up on a footwall ramp. Before slip on the fault, the hanging-wall ramp between T and U was adjacent to the footwall ramp between V and W, and the hangingwall ramp between P and Q was adjacent to the footwall ramp between R and S. Note that after slip, the number of hanging-wall flats and ramps still matches the number of footwall flats and ramps.
|
|
|
|
|
FIGURE 5.12. (a) Block diagram illustrating klippe, window, allochthon, and autochthon. Fault in red. (b) Photo of Glacier Park’s Chief Mountain, a klippe in the US Rockies (Montana). [18.10] |


When combining map and cross-sectional surfaces with topography, we create a more realistic block diagram, giving us a three-dimensional representation of a region’s geology. Consider an area that is characterized by a low-angle reverse faulting (a thrust). Where erosion cuts a hole through a thrust sheet, exposing rocks of the footwall, the hole is a window and the teeth are drawn outwards from the hole (Figure 5.12). An isolated remnant of a thrust sheet surrounded by exposures of the footwall is a klippe, which is marked by a thrust-fault symbol with the teeth pointing inward.
Strike-Slip Faults
Fault bends (or steps) along strike-slip faults cause changes in the strike of the fault. To describe the orientation of such fault bends, imagine that you are straddling the fault and are looking along its strike; if the bend moves the fault plane to the left, you say the fault steps to the left, and if the bend moves the fault plane to the right, you say that the fault steps to the right. Note that the presence of bends along a strike-slip fault results in either contraction or extension across the step, depending on its geometry.
|
|
FIGURE 5.13. Map-view illustrations of (a) a restraining bend and (b) a releasing bend along a right-lateral strike-slip fault. [8.12] |

Locations where the bend is oriented such that blocks on opposite sides of the fault are squeezed together are restraining bends, whereas locations where the bend is oriented such that blocks on opposite sides of the fault pull away from each other are releasing bends (Figure 5.13). Where movement across a segment of a strike-slip fault results in some compression, we say that transpression is occurring across the fault, and where movement results in some extension, we use the term transtension. Note that a step to the left on a right-lateral fault yields a restraining bend, whereas a step to the right on a right-lateral fault yields a releasing bend. Try to make up the rules for a left-lateral fault yourself. Natural examples of these structures, such as along the San Andreas Fault of California, will be discussed later.
SUBSIDIARY FAULTS
Fault zones consist of one or more major faults, along with an array of subsidiary faults, including both discrete smaller faults that occur within a larger fault zone (and may anastomose with one another) and fault splays that branch off. Such subsidiary faults may initiate when the primary rupture splits into more than one surface during its formation in intact rock, when numerous subparallel faults initiate simultaneously in a fault zone, when conjugate shear fractures develop at an angle to the principal fault, or when numerous preexisting surfaces in the fault zone reactivate during a deformation event.
|
|
FIGURE 5.14. Growth of R-, R′-, and P-shears. (a) Schematic diagram illustrating a layer of clay that deforms when underlying blocks of wood slide past one another. (b) Map view of the top surface of the clay layer, illustrating the orientation of Riedel (R), conjugate Riedel (R′), and P-shears. Note that the acute bisector of the R- and R′-shears is parallel to the remote σ1 direction. [8.20] |

In the case of emergent strike-slip faults, like the San Andreas Fault, a particularly interesting array of subsidiary faults, known as R- (or Riedel) and P-shears, develops. To picture how these develop, imagine an experiment in which you place a thin layer of clay over two wooden blocks, and then shear one block horizontally past the other (Figure 5.14a). The clay develops ductile strain before any fractures appear. When fracturing in the clay begins to develop, the first fractures are short shear fractures that are inclined at an angle to the trace of the throughgoing fault that eventually forms (Figure 5.14b). These short fractures are called R- or Riedel shears[1]. Generally, you will find two distinct sets of Riedel shears (R and R′) that together define a conjugate pair. The bisector of the acute angle between conjugate R- and R′-shears reflects the local orientation of σ1 adjacent to the future fault. As shear continues, a third set of fractures, called P-shears, develops. P-shears link together the previously formed Riedel shears, and, eventually, a throughgoing fault zone consisting of linked R-, R′-, and P-shears develops.
Whether subsidiary shears also form at depth in the earth remains debatable. In fact, some geologists suggest that they only form when a weak layer is sheared by relative displacement of two stronger blocks on either side or below, much as in our experiment.
Tensile fractures can also develop in association with faulting, which may occur in the wall rock, or in the fault zone itself. A series of parallel tensile fractures that forms within a fault zone defines an en-echelon array or stepped array that tends to dilate and become veins (see Chapter 7). Typically, stepped veins in a fault zone initiate at an angle of about 45° to the zone boundary and rotate with the direction of shear. With progressive displacement of the fault-zone walls, the earlier formed parts of the veins rotate, but new vein increments initiate at an angle of about 45° to the walls, producing a sigmoidal shape whose sense of rotation defines the sense of shear on the fault.
FAULT DIMENSIONS AND TERMINATIONS
Fault Terminations
Faulting develops at all scales, from microscopic faults that offset the boundaries of a single grain, to megascopic faults that cut laterally across thousands of kilometers of crust. But even the biggest faults do not extend infinitely in all directions. They terminate in several ways.
|
|
|
FIGURE 5.15. (a) Cross-sectional sketch showing various types of fault terminations. The fault terminates at the ground surface at point A; at point B, the fault has been cut by a pluton; at C and D, one fault cuts another; at E, the fault was eroded at an unconformity. (b) Termination of a fault by merging with another fault (at point A), or by horsetailing (at point B) and dying out into a zone of ductile deformation (at point C). (c) A series of ramps merging at depth with a basal detachment. [8.13] |

Faults terminate where cut by younger structures, such as another fault, an unconformity, or an intrusion (Figure 5.15a). Application of the principle of crosscutting relationships allows you to determine the relative age of faults with respect to the structures that cut them. Some faults link to other faults while both are active (Figure 5.15b). For example, fault splays diverge from a larger fault, and faults in an anastomosing array merge and diverge along their length. Where a fault does not terminate against another structure, it must die out, meaning that the magnitude of displacement decreases along the trace of the fault, becoming zero at its tips. In some cases, a fault splits into numerous splays near its end, thereby creating a fan of small fractures called a horsetail (point B in Figure 5.15b), or it may die in an array of pinnate fractures. Alternatively, the deformation associated with the fault dies out in a zone of ductile deformation (e.g., folding or penetrative strain; point C in Figure 5.15b).
The boundary between the slipped and unslipped region at the end of a fault is the tip line of the fault (Figure 5.16a). Faults that you can map today in the field terminate at the ground surface either because the fault intersected the ground when it moved or because it has been subsequently exposed by erosion. If the fault intersected the ground surface while it was still active, it is an emergent fault (Figure 5.16a), but if it intersects the ground surface only because the present surface of erosion has exposed an ancient, inactive fault, it is an exhumed fault. Exhumed and emergent faults must die out along their strike, unless they terminate at another structure; their tip line intersects the ground surface at a point. A fault that dies out in the subsurface, and thus does not intersect the ground surface, is called a blind fault.
|
|
FIGURE 5.16. Tip lines for (a) an emergent fault and (b) a blind fault. [8.14] |

Fault Dimensions and Self-Similarity
Whereas the length of some faults is limited by their intersection with, or truncation by, other structures, for many faults the trace length changes with time as the fault evolves. To visualize this process, imagine a fault that grows outward. At a given instant of time, slip has occurred where the fault surface already exists, but there is no slip beyond the tip of the fault (Figure 5.17a). A little later, after more fault-tip propagation, there is increased slip in the center of the fault (Figure 5.17b).
|
|
|
|
FIGURE 5.17. (a, b) Map view illustrating that displacement on a fault grows as the fault length increases. At time 1, the short fault only offsets marker line XX′ by a small amount. At time 2, the fault has grown in length, and marker line XX′ has been offset by a greater amount. Note that the displacement decreases toward the end of the fault. (c) Log–log plot showing the apparent relationship between fault length (L) and fault displacement (D): D = c ⋅ Ln. The exponent, n, is called the fractal dimension. Various fits are possible, but a general relationship is D = 0.03 L1.06, suggesting an approximate displacement–length ratio of about 0.03. [8.15] |
|


As a consequence, the displacement changes along the length of the fault and the magnitude of displacement must be less than the length of the fault. Considering this relation, we might expect a general relationship between fault length and displacement: the longer the fault trace, the greater the displacement. Indeed, recent work supports this idea, though the details remain controversial. Faults that are meters long display offsets typically on the order of centimeters or less, whereas faults with lengths on the order of tens of kilometers have typical offsets on the order of several hundreds of meters. Figure 5.17c shows a plot of fault length versus offset, based on examination of thousands of faults that occur in a variety of lithologies and range in length from centimeters to hundreds of kilometers. The points can be fitted to a ∼45° sloping band, suggesting that, given a knowledge of fault length, we can predict displacement (or vice versa) independent of the properties of the material. Debate continues as to whether a single relationship is appropriate for both regional and mesoscopic faults, as the best-fitting straight line seemingly underestimates displacement for shorter faults and overestimates for longer faults. Nevertheless, a convenient rule of thumb emerges—that fault displacement is about 3% of fault length—based on the values in Figure 5.17. Other studies indicate similar scaling properties for fault gouge/cataclasite and width, although these are not as well constrained.
FAULT SURFACES
Slickensides and Slip Lineations
Displacement on a fault in the brittle field involves frictional sliding and/or pressure solution slip. Each process yields distinctive structures (slickensides and slip lineations) on the fault surface, which may provide information about the direction of net slip and, in some cases, the shear sense of slip during faulting.
|
FIGURE 5.18 (a) Shiny slickensided surface in Paleozoic strata of the Appalachians (Maryland, USA); coin for scale. (b) Slip fibers on a fault surface, showing steps that indicate sense of shear; compass for scale. [8.18] |
|


If slip on a fault takes place by frictional sliding, asperities on the walls of the fault break off and/or plow into the opposing surface and wear down. As a result, the two walls of the fault may become smoother and, in some cases, attain a high polish. Fault surfaces that have been polished by the process of frictional sliding are called slickensides (Figure 5.18). Slickensides form either on the original wall rock of the fault, or on the surface of a thin layer of gouge/cataclasite. Some asperities on one wall of the fault plow into the surface of the other wall, thereby creating groove lineations on the slickenside, resulting in formation of a lineated slickenside, also called slickenlines. These lineations resemble the glacial striations created when rocks entrained in the base of a moving glacier scratch across bedrock, though they are much smaller.
Groove lineations are not the only type of lineation that forms on brittle faults. On fault surfaces coated with fine-grained material, fault slip may mold gouge into microscopic linear ridges that, along with grooves, create a lineation visible on the fault surface. Also, some fault surfaces initiate with small lateral steps, whose presence gives the fault a corrugated appearance. These corrugations resemble grooves, but can be longer than the total displacement on the fault. The origin of corrugations is not well understood.
|
|
|
|
FIGURE 5.19 (a) Illustration of the growth of slip fibers along a fault, and (b) block diagram illustrating steps along a fiber-coated fault surface. Restraining steps become pitted by pressure solution, releasing steps become the locus of vein growth, and oblique restraining steps become slickenlines. [8.19] |
|


Many fault surfaces are coated by elongate fibers of vein minerals (typically quartz, calcite, or chlorite), whose long axes lie subparallel to the fault surface (Figure 5.19a). These fibers grow incrementally by the “crack-seal” deformation mechanism, or by solution mass transfer through a fluid film along the fault surface. Thus, fiber formation does not always involve brittle rupture along the fault surface. Whether frictional sliding is accompanied by fiber growth depends on the strain rate and fluid conditions during faulting. Fibers form at smaller strain rates and require the presence of water films, and typically form in imbricate sheets (Figure 5.19b). As movement continues, multiple sheets of fibers may develop on top of one another, so that a vein up to several centimeters thick eventually develops along the fault plane. In relatively thick veins (> 2 or 3 cm), the internal portion of the vein may consist of blocky growth, which forms either by recrystallization of earlier-formed fibers, or by precipitation of euhedral crystals in gaps along the fault surface.
Slip lineations trend parallel to an increment of displacement on a fault, and thus allow you to determine whether the increment resulted in strike-slip, dip-slip, or oblique-slip offset. If all movement on the fault has been in the same direction, then the slip lineation defines the orientation of the net-slip vector. You must use caution when interpreting slip lineations, however, because they may only define the last few increments of displacement on a fault surface on which slip in a range of directions occurred. Moreover, the last increment of frictional sliding sometimes erases grooves formed during earlier increments, and formation of one sheet of fiber lineations may cover and obscure preexisting sheets of fiber lineations. If more than one set of lineations are preserved on a fault surface, you can study them to distinguish among multiple nonparallel slip increments.
Structures on a fault surface may provide constraints on the shear sense. For example, as frictional sliding occurs, an original irregularity on a slickenside becomes polished more smoothly on the upslip side, and remains rougher on the downslip side, and subtle steps may develop on the fault surface. These features create an anisotropy on a slickenside; the surface feels smoother as you slide your hand in the shear direction as opposed to sliding your hand in the direction opposite to the shear direction. However, anisotropy on a slickenside is subtle and may be ambiguous because the intersection of pinnate fractures with the fault surface may create steps that face in the opposite direction to the steps formed by differential polishing.
Sheets of mineral fibers formed during slip on a fault provide a more reliable indication of shear sense. Because the fibers composing the sheets form at a low angle to the fault surface, fiber sheets tend to overlap one another like shingles, and tilt away from the direction of shear. Features developed on mesoscopic steps along a fault that moved by pressure-solution slip may also define shear sense. Restraining steps oppose movement on the fault, and therefore become pitted by pressure solution. Pit axes on the steps are roughly parallel to the net-slip vector, and thus are subparallel to the fault surface. If the restraining-step face is not perpendicular to the fault surface, its pit axes are oblique to the step face. Surfaces containing such oblique pits look like a cross between a stylolite and a slip lineation, and thus some authors call them slickenlines (Figure 5.19b). Releasing steps, at which the opposing walls of the fault pull away from one another, typically become coated with fibrous veins. The long axes of the fibers of these veins parallel the pit axes on releasing steps along the same fault.
FAULT ROCKS
Faulting in the frictional regime involves either shear fracturing of a previously intact rock, in which case a multitude of cracks coalesce, or slip on a preexisting fracture, which may lead to formation of new off-plane fractures and fault splays. Thus, the process of brittle faulting tends to break up rock into fragments, producing brittle fault rock. We classify brittle fault rock based on whether it is cohesive or noncohesive (i.e., whether or not the fragments comprising the fault rock remain stuck together to form a coherent mass without subsequent cementation or alteration) and on the size of the fragments that make up the fault rock. Below we summarize the principal terms that we use to describe brittle fault rocks.
Classification of Fault Rocks
We divide fault rocks into two classes based on their prominence in the respective deformation regimes: cataclasite and mylonite. Other classification schemes are used; for example, the cohesiveness of the fault rock. Descriptions of fault rock types are below, focusing on hand-specimen appearance and degree of cohesion:
Argille scagliose A cohesive fault rock that forms in very fine-grained clay- or mica-rich rock (e.g., shale or slate) and is characterized by the presence of a very strong wavy anastomosing foliation. As a consequence, the rock breaks into little scales or platy flakes.
Cataclasite A cohesive fault rock composed of broken, crushed, or rolled grains. Unlike breccia, it is a solid rock that does not disintegrate when struck with a hammer.
Fault breccia Rock composed of angular fragments of rock greater than about 1 mm, and as much as several m across. Fault breccia is noncohesive.
Fault gouge Rock composed of material whose grain size has been mechanically reduced by pulverization. Grains in fault gouge are less than about 1 mm in diameter. Fault gouge can be noncohesive and cohesive. Shearing of gouge along a fault surface during progressive movement may create foliation within the gouge.
Mylonite Relatively fine-grained, cohesive fault rock formed by crystal plastic processes, often associated with mylonitic foliations and lineations.
Pseudotachylyte A glass or microcrystalline material that forms when frictional heating melts rock during slip on a fault. Pseudotachylyte commonly flows into cracks between breccia fragments or into cracks penetrating the walls of the fault. In special cases, pseudotachylyte may be several m thick (e.g., impact sites), but generally it is mm to cm in thickness.
Vein-filled breccia Fault-breccia blocks that are cemented together by vein material. Another term, indurated breccia, is synonymous.
Creation of a random array of nonsystematic mesoscopic fractures that surround angular blocks of rock creates fault breccia (Figure 5.20a). In general, breccias have random fabrics, meaning they do not contain a distinctive foliation. Continued displacement across the fault zone may crush and further fragment breccia, and/or may break off microscopic asperities protruding from slip surfaces in the fault zone, thereby creating a fine-grained rock flour that we call fault gouge (Figure 5.20b). Gouge and (micro)breccia easily fall apart when collected at a fault zone or hit with a hammer.
|
FIGURE 5.20. (a) Fault breccia from the Buckskin detachment (Battleship Peak, Arizona, USA). (b) Banded clay gouge from the Lewis Thrust (Alberta, Canada). [8.16] |
|


The network of fractures between fragments in breccia and gouge allows groundwater to pass through the fault zone. Minerals like quartz or calcite may precipitate out of the groundwater, thereby cementing together rock fragments in the fault zone. As a result, breccia and gouge become indurated, meaning that the fragments are cemented together. In coarse breccia, the cement typically also fills veins of euhedral or blocky crystals in the open spaces between rock fragments, resulting in formation of a vein-filled breccia (Figure 5.20a). Circulating groundwater may also have the effect of causing intense alteration and new growth of minerals in the gouge or breccia zone. Alteration rates in fault zones tend to be greater than in intact rock, because fragmentation of rock body increases the net area of reactive surfaces. As a consequence, some minerals (e.g., feldspar) transform into clay (Figure 5.20b). The layer of clay that develops in some fault zones can act as an impermeable barrier, or seal, to further fluid movement. In olivine-rich rocks, such as basalt and peridotite, reaction of fault rock with water yields the mineral serpentine. As we mentioned earlier, clay and serpentine are relatively weak minerals, so their presence along a fault may allow it to slip at lower frictional stresses than it would if the original minerals were present.
Cataclasite is a cohesive brittle fault rock that differs from gouge or breccia in that the fragments interlock, allowing the fragmented rock to remain coherent even without cementation. Cataclasites generally have random fabrics (i.e., no strong foliation or lineation). Some geologists use subcategories of cataclasite, based on the proportion of matrix in the rock. In protocataclasite, 10–50% of the rock is matrix; in cataclasite (sensu stricto) 50–90% is matrix; and in ultracataclasite 90–100% is matrix.
Cataclasis is the movement on a fault by a combination of microcracking, frictional sliding of fragments past one another, and rotation and transport of grains. To picture this process, imagine what happens to corn passing between two old-fashioned millstones. The millstones slide past one another and, in the process, transform the corn into cornmeal. Cataclasis, if affecting a relatively broad band of rock, results in mesoscopically distributed or ductile strain, in which case it is also called cataclastic flow, because the rock over the width of the band effectively flows. To picture cataclastic flow, think of how the cornmeal we just produced, when poured from one container to another, behaves much like a fluid, even though the individual grains are solid. Movement on a fault that involves development of a zone in which cataclastic flow occurs is often referred to as a cataclastic shear zone.
|
|
FIGURE 5.21. Pseudotachylyte (dark, wispy bands) near the Grenville Front (Ontario, Canada); looney for scale. (Courtesy of J. Magloughlin) [8.17] |

Pseudotachylyte and argille scagliose are two less common types of fault rock. Pseudotachylyte (from the prefix pseudo-, which means “like,” and tachylyte, which is a type of volcanic glass) is glass or very finely crystalline material that forms when frictional sliding generates enough heat to melt the rock adjacent to the fault (Figure 5.21). Such conditions occur during earthquakes. Because rock is not a good conductor, the heat generated by frictional sliding cannot flow away from the fault, and temperatures in the fault zone quickly become very high (>1000°C). Melt formed in such a setting squirts into cracks and pores in the fault walls where it cools so quickly that it solidifies into a glass. Argille scagliose refers to a strongly foliated fault rock formed by pervasive shearing of a clay-rich or very fine-grained mica-rich lithology such as shale or slate. In argille scagliose (“scaly clay” in Italian) foliation planes (microscopic shear surfaces) are anastomosing and very shiny, yielding a rock that has the overall appearance of a pile of oyster shells. Argille scagliose can develop under non-metamorphic conditions (e.g., at the base of a sedimentary mélange) or in low-grade metamorphic conditions. Similar scaly fabrics also form in other fine-grained lithologies, such as coal and serpentinite.
Fault Character with Depth
The characteristics of a fault depend on the magnitude of displacement on the fault, on whether or not faulting ruptures a previously intact rock or activates a preexisting surface, and on the pressure and temperature conditions (i.e., burial depth) at which faulting occurs. Figure 5.22 is a synoptic diagram of the various expressions of a major crustal fault zone as a function of depth and temperature.
|
|
FIGURE 5.22. Changes in fault character with depth for a steeply dipping fault. Note the change in fault zone width and types of fault rock with depth. [8.26] |

At very shallow depths in the earth (less than ∼5 km), mesoscopic faults that form by reactivation of a preexisting joint or bedding surface typically result in discrete slickensided or fiber-coated surfaces. Mesoscopic shallow-level faults that break through previously intact rock tend to be bordered by thin breccia or gouge zones, and macroscopic faults, which inevitably break through a variety of rock units and across contacts, tend to be bordered by wider breccia and gouge zones, and subsidiary fault splays. As we discussed earlier, rocks become progressively more ductile with depth in the crust, because of the increase in temperature and pressure that occurs with depth. Consequently, at depths between ∼5 km and 10–15 km, faulting tends to yield a fault zone composed of cataclasite. Whereas cataclasite forms by brittle deformation on a grain scale, movement in the fault zone resembles viscous flow and strain is distributed across the zone (i.e., we have ductile behavior; see Chapter 9). The frictional-plastic transition for typical crustal rocks lies at a depth of 10–15 km in the crust. We purposely specify the transition as a range, because rocks consist of different minerals, each of which behaves plastically under different conditions, and because the depth of transition depends on the local geothermal gradient. Temperature conditions at a depth of around 10–15 km are in the range of 250°C to 350°C (i.e., lower greenschist facies of metamorphism), where plastic deformation mechanisms become the dominant contributor to strain in (quartz-rich) crustal rocks. The activity of plastic deformation mechanisms below this brittle-plastic transition yields a fine-grained and foliated fault-zone rock, called mylonite (see below).
The degree of distributed (or ductile) deformation that accompanies faulting also depends on the strain rate and on the fluid pressure. At slower strain rates, a given rock type is weaker and tends to behave more ductilely, meaning deformation is more distributed. Thus, rocks can deform ductilely even at shallow crustal levels if strain rates are slow, Analogously, rocks below the frictional-plastic transition can deform brittlely if strain rates are high. A given shear-zone interval may therefore contain both mylonite and cataclasite, either as a consequence of variations in strain rate at the same depth or because progressive displacement eventually transported the interval across the brittle-plastic boundary. At very rapid strain rates (seismic slip), fault displacement in dry rock generates pseudotachylyte.
The width of a given fault zone (Figure 5.22) typically varies as a function of rock strength; fault zones tend to be narrower in stronger rock. Thus, the width of a trans-crustal fault zone would vary with depth. Very near the surface (within a few kilometers), the fault diverges into numerous splays, because the near surface rock is weakened by jointing and by formation of alteration minerals (e.g., clay). At somewhat greater depths, rock is stronger, and the fault zone may be narrower. At still greater depths, where cataclastic flow dominates, the fault zone widens and we find further widening of the mylonitic segment of the fault zone with depth, where the rocks as a whole are weaker. We dig a little deeper into mylonites below, which is the characteristic fault rock at depth in Earth.
FAULT ROCKS: MYLONITES
Imagine a cold and wet day in northern Scotland, which is not a far stretch of the imagination if you’ve visited the area. While mapping part of the Scottish Highlands you are struck by the presence of highly deformed rocks that overlie relatively undeformed, flat-lying, fossiliferous sediments. This relationship is even more startling because the overlying unit has experienced much higher grade metamorphism than the underlying sediments, and it contains no fossils. When you arrive at the contact between these two rock suites, you notice that they are separated by a distinctive layer of light-colored, powdery-looking rock. The regional relationships of the suites and their superposition already suggest that the contact is a low-angle reverse (or, thrust) fault. So, what is the distinctive fine-grained rock at the contact? In your mind you envision the incredible forces associated with the emplacement of the hanging wall unit over the footwall, and you surmise that the rock at the contact was crushed and milled, like what happens when you rub two bricks against each other. Using your class in ancient Greek, you decide to coin the name mylonite for this fine-grained layer, because “mylos” is Greek for milling. Something like this happened over a hundred years ago in Scotland where the late Precambrian Moine Series (“crystalline basement”) overlie a Cambro-Ordovician quartzite and limestone (“platform”) sequence along a Middle Paleozoic low-angle reverse fault zone, called the Moine Thrust. This classic Caledonian area was mapped by Charles Lapworth of the British Geological Survey in the late nineteenth century. Anecdote has it that Lapworth became convinced that the Moine Thrust was an active fault and that it would ultimately destroy his nearby cottage and maybe take his life; Lapworth’s later years were spent in great emotional distress.
|
(a) |
(b) |
|
FIGURE 5.23. (a) The Parry Sound shear zone in the Grenville Orogen (Ontario, Canada) displays the common characteristics of mylonites, including mylonitic foliation, mineral lineation (or, stretching lineation) and various shear-sense indicators. (b) A close-up highlights the undulating mylonitic S-foliation and relatively fine grain size of the zone compared to gabbroic-anorthosite wall rock. [12.2] |
|


The inference concerning the formation of mylonites is mechanically incorrect. Whereas the derivation of the name mylonite suggests that cataclastic flow is the process of grain-size reduction, mylonites record the activity of crystal-plastic processes that we examine in detail later. Mylonites are associated with all kinds of shear zones, whether they result from reverse displacement (such as Grenville thrusts in Canada; Figure 5.23), normal displacement (such as those in core complexes and the Basin-and-Range of the western USA), or strike-slip displacement (such as the Alpine fault in New Zealand). In each of these structural settings mylonites reflect conditions that promote crystal-plastic deformation mechanisms, which are reached at various values of temperature, strain rate, and stress, depending on the dominant mineral in the rock. For example, marble mylonites and quartzite mylonites form at temperatures that are lower than those at which feldspathic mylonites form, because the onset of plasticity occurs at different temperatures in calcite (>250°C), quartz (>300°C) and feldspar (>450°C). Sometimes we find that quartz deformed plastically, while feldspar grains deformed by fracturing. In such cases, we conclude that shearing occurred at temperatures greater than ~300°C, but less than ~500°C (coinciding with the greenschist facies of metamorphism).
Types of Mylonites
The widespread occurrence of mylonites has led to the development of several prefixes to distinguish among different types of mylonites, and a mica-rich, usually lower-grade equivalent that is called phyllonite. Commonly used terms are:
Blastomylonite Mylonite that contains relatively large grains that grew during mylonitization (e.g., from metamorphic reactions or secondary grain growth).
Clastomylonite Mylonite that contains relatively large grains or aggregates that remain after mylonitization reduced the grain size of most of the host rock (e.g., relatively undeformed feldspar grains or clumps of mafic minerals).
Phyllonite Mica-rich mylonite.
Protomylonite Mylonite in which the proportion of matrix is <50% (i.e., rocks in which only a minor portion of the minerals underwent grain-size reduction).
Ultramylonite Mylonite in which the proportion of matrix is 90–100% (i.e., rocks in which mylonitization was nearly complete).
Protomylonite and ultramylonite are used to describe mylonites in which the proportion of matrix is <50% and 90–100%, respectively. In a protomylonite, only part of the rock is mylonitized, whereas pervasive mylonitization has occurred in an ultramylonite. Mylonites containing 50–90% matrix are known simply as mylonite. Blastomylonite and clastomylonite are used to describe mylonites containing large grains surrounded by a fine-grained matrix that grew during mylonitization or that remained from the original rock, respectively. The terms derive from the Greek words “blastos,” meaning growth and “klastos,” meaning broken. These prefixes are used for microstructural description of mylonites, but they are also used as field terms. Clastomylonite is used to describe mylonites that contain coarse fragments of less deformed host rock or exotic lithologies, such as those in marble mylonite of Figure 5.24.
|
|
FIGURE 5.24. A clastomylonite that contains relatively undeformed clasts of varied lithologies in a fine-grained, highly deformed marble matrix (Grenville Orogen, Ontario, Canada); width of view ~1m. [12.3] |

Mechanics of Faults
Following our geometric and kinematic descriptions of faults and fault rocks, we return to the mechanics of faulting, and reverse faulting in particular. Earlier we explored fault formation and friction (Chapter 3), but those examinations leave a large question unresolved. How can one move large, heavy blocks of crust, such as those found in thrust systems, given that the normal stress acting on a reverse fault should be large? Indeed, the formation of thrust belts like the Rockies and the Appalachians in North America and the Alps in Europe has been particularly perplexing to 20thC geologists, because the displacement of individual thrust sheets over tens to hundreds of km creates a major challenge, which is called the Thrust Paradox. Later, in the chapter on extensional tectonics, we see that shallowly-dipping normal faults require similar solutions as presented here.
The Thrust Paradox
|
|
FIGURE 5.25. (a) When pushed from the rear, a rectangular thrust sheet sliding on dry rock would be crushed before overcoming frictional resistance. (b) If there is high fluid pressure at the basal detachment (blue), the effective stress decreases and allows the thrust sheet to move under very small applied load. (c) A low friction material (green) in the fault lowers the shearing stress for movement. σl is the stress resulting from horizontal loading, σf is frictional resistance, σl represents the boundary load at the end of the thrust sheet, and PH2O represents the pore fluid pressure. Other terms are defined in the text. [18.30] |

Picture a thrust sheet, in cross section, to be a rectangle resting on a surface (Figure 5.25a). If you assume a reasonable value for frictional resistance (σf) to sliding on the underlying detachment, assuming the detachment is dry, then the stress necessary to push the sheet over a horizontal surface or up a gentle incline greatly exceeds the failure strength of the intact rock comprising the thrust sheet. Thus, you would expect the hinterland end of the thrust sheet to crush or buckle before the sheet as a whole would move. Yet clearly, large thrust sheets do exist. So how do they move, and how do belts composed of many large thrust sheets develop? It took several decades for geologists to develop models that address these key questions.
Geologists first attacked the issue of how to overcome the friction between solid surfaces that presumably provided the resistance for thrust-sheet movement. In the late 1950s researchers14 realized that the force required to move a thrust sheet can be greatly diminished if hydrostatic pressure in the detachment zone increases to values approaching lithostatic loads (Figure 5.25b). Hydrostatic pressure refers to the pressure in the water that fills pores and cracks in rock, while lithostatic pressure refers to the pressure within solid grains generated where grains are in direct contact. A pore resembles a tiny balloon between grains. If you force water into the pore, the water pushes outward, just like the air in a balloon pushes outward if you blow up the balloon. In effect, the fluid pressure in a detachment zone “lifts up” the thrust sheet so that it can glide over the detachment.
By returning to the friction criterion for failure (Chapter 3), we can gain further insight into the role of fluid pressure in thrust-sheet movement. For sliding to occur, the shear stress (σs) applied to the fault surface must exceed frictional resistance (σf). When rock is dry, the equation relating the shear stress (σs) necessary to cause sliding on a detachment surface to the normal stress (σn) squeezing the two sides of the detachment together is:
σs = C + μ . σn Eq. 5.1
where C is the cohesion and μ is the coefficient of internal friction. This equation shows that as the normal stress (representing the vertical load due to the weight of the thrust sheet) increases, the shear stress needed to cause movement on the detachment increases (Figure 5.33a). Let’s use some numbers. Consider a sliding block of 100x10x5 km with a representative density of 2,600 kg/m3. The normal stress, which is F/area, is 127 MPa, so, using a characteristic friction coefficient of 0.7, the shear stress is at least ~90MPa (assuming that cohesion for a preexisting fault is small). This exceeds the compressive strength of natural rocks, so the block will fracture at the edge instead of moving.
If, however, the rock in the detachment horizon is wet, water creates pore pressure (Figure 5.33b). The pore pressure pushes up the load, and counteracts σn. Thus, the frictional resistance to sliding depends instead on the effective normal stress (σn*) across the surface. We define σn* as:
σn* = σn – PH2O Eq. 5.2
where PH2O is the fluid pressure. Substituting effective stress (σn*) back into the Mohr-Coulomb criterion yields:
σs = C + μ.σn* Eq. 5.3
Equation 18.3 tells us that, as fluid pressure increases, the effective normal stress across the detachment decreases, because fluid in the detachment zone partially supports the weight of the thrust sheet. As the effective normal stress decreases, the shear stress needed to cause sliding decreases. Therefore, the thrust sheet can be moved without fracturing when fluid pressure is high, even when the boundary load at the hinterland edge of the sheet is significantly lower than the failure strength of rock comprising the sheet.
More recently, the role of lubricants in fault rock with lower friction coefficient that host rock, such as clay, is recognized (Figure 18.30c). Use μf for fault rock friction, equation 5.3 becomes:
σs = C + μf.σn* with μ > μf Eq. 5.4
which tells us that lower fault rock friction has the same lowering effect on shear stress as fluid pressure. Considering a fault rock friction coefficient value of 0.2 and our fault block moves at a shear stress of ~25 MPa (as before, C is small). The combination of low-friction material and elevated fluid pressure in fault zones would lower sliding resistance even more. So, moving our large thrust block suddenly becomes quite easy, resolving the ubiquitous occurrence of major thrust faults in nature. Paradox resolved !
Thrust Wedges
|
|
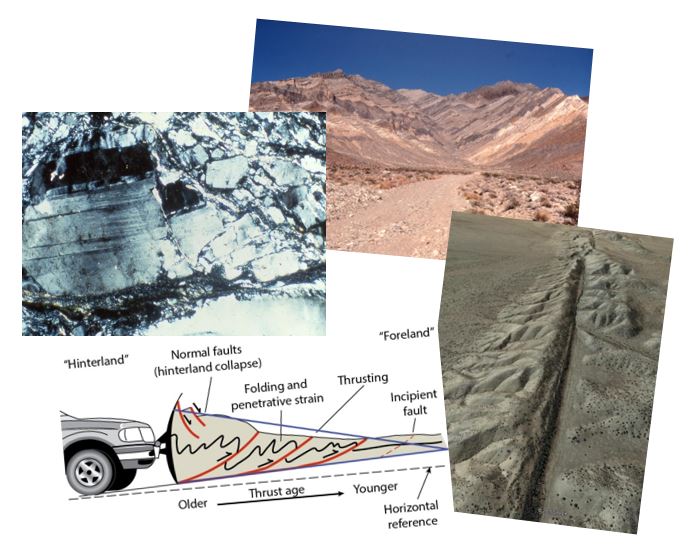
FIGURE 5.26. Snowplow analogy for fold-thrust belt development. The wedge of snow lengthens with continued shortening; younger thrusts initiate in a hinterland to foreland progression. While new thrusts are adding material at the toe of the wedge, the hinterland portions are developing penetrative strain, normal faults, and slump features. The critical wedge geometry outlined in blue. [18.32] |

The next major step in formulating an understanding of thrust system development came in the 1970s, when researchers began to use laboratory models that simulated the development of the belts. Models involving the formation of a sand wedge building in front of a plow proved to be particularly informative (Figure 5.26). That’s because sand is a Coulomb material, meaning an aggregate composed of grains that can frictionally slide past one another, and at the scale of a mountain range, rock of the upper crust behaves essentially like a Coulomb material. Also, if continental crust is scaled down to the size of a typical laboratory sandbox (m scale), the strength of crustal rock is comparable to that of unconsolidated sand. In Coulomb-wedge sand models, the plow pushes into a sand layer underlain by a hard material. The boundary between the sand and the underlying hard material represents the basal detachment. Note that the wedge depicted in Figure 5.26 has a foreland-dipping topographic surface and a hinterland-dipping basal detachment, like moving up a driveway, which is similar to the cross-sectional shape of the accretionary wedge (see Chapter 14).
|
|
FIGURE 5.27. The critical taper theory of fold-thrust belt mechanics. The critical taper (φc) is defined as the sum of the surface slope angle (α1) and the detachment slope angle (β). (a) Stress acting on a wedge is partly a horizontal boundary load caused by the backstop (σbs) and is partly caused by gravity (σg). (b) If the backstop moves, the wedge thickens, so the surface slope increases, and the taper (φ) eventually exceeds φc. (c) The wedge slides toward the foreland and new material is added to the toe, and extension of the wedge occurs so that surface slope decreases. Critical taper in red. [18.33] |

Two sources of stress drive the development of a Coulomb wedge. One source is a result of the displacement of the plow blade toward the foreland. This stress is called a horizontal boundary load. Another source is the result of the gravitational potential energy that develops when a foreland-dipping topographic slope develops (i.e., when the hinterland portion of the wedge rises and becomes higher than the foreland portion). Note that the gravitational potential energy, due to the elevation of the hinterland, creates both vertical and horizontal stresses. In Figure 5.27a, we represent these stresses as follows: σbs is the horizontal boundary load caused by movement of the backstop toward the foreland; σgv is the vertical component of stress caused by gravity; σgh is the horizontal component of stress caused by gravity.
Let’s look more closely at the evolution of a Coulomb wedge (for example, a sand wedge). As the backstop moves toward the foreland, the wedge deforms internally (by forming folds, faults, and grain-scale distortion) and, as a consequence, its surface slope increases. When the wedge reaches a certain critical taper angle, φc (defined as the surface slope angle, α1, plus the detachment dip, β), the wedge as a whole slides toward the foreland along the weak detachment (Figure 5.27a). Slip occurs on the detachment because the coefficient of sliding friction on the detachment is less than the coefficient of internal friction in the wedge. If the taper angle becomes too large (Figure 5.27b), processes take place within the wedge to cause the surface slope of the wedge to decrease (Figure 5.27c). Several processes can cause the slope angle to decrease, including the addition of new thrust slices at the toe (a process called off-scraping), the erosion of the higher portions of the wedge, or the development of extensional faulting (extensional collapse) within the wedge. If these processes continue until the taper angle become less than the critical taper angle, sliding of the wedge stops, and deformation within the wedge occurs once again to thicken the wedge internally and increase the surface slope. This internal thickening can involve reactivation of thrusts, formation of out-of-sequence faults, formation of duplexes at the base of the wedge (a process also called underplating), or formation of penetrative strain and folding within thrust sheets. Internal thickening increases the topographic slope angle until the wedge achieves the critical taper angle again. Then, the wedge again starts sliding toward the foreland and new thrusts form at the toe.
The observed critical taper of a given fold thrust system depends on the material strength of the wedge, the resistance to sliding across the basal detachment, and the ratio of fluid pressure to overburden pressure both in the wedge and across the detachment. If the effective strength of the wedge is increased (either by increasing rock strength or by decreasing fluid pressure), then the critical-taper angle decreases. If the resistance to sliding on the basal detachment is increased (either by increasing the coefficient of sliding friction or by decreasing the fluid pressure), then the critical-taper angle increases. Thrust systems whose basal detachments lie in salt, a very weak lithology, have a critical taper angle as low as 1° to 2°, whereas thrust systems that have detachments in stronger rocks may have critical taper angles as high as 8° to 10°.
FAULTS AND SOCIETY
All this description and theory may make us forget that the study of faulting is not just an academic avocation. Faults must be studied carefully by oil and mineral exploration geologists, because faulting controls the distribution of valuable materials. Similarly, faults and fractures play an important role in groundwater mobility and the general availability of water. Regional fault analysis is required for the localization and building of large human-made structures, such as dams and nuclear power plants. Such structures, which may have devastating impact when they fail, should clearly not be built near potentially active faults. But perhaps the most dramatic effect of fault activity on society comes in the form of earthquakes, which can be responsible for great loss of life (in some cases measured in the hundreds of thousands) and can destroy the economic stability of industrialized countries (damages may be hundreds of billions of dollars). We close this chapter by briefly looking at these more immediate consequences of faulting.
Faulting and Resources
Faults contribute to the development of oil traps by juxtaposing an impermeable seal composed of packed gouge or fault-parallel veining against a permeable reservoir rock, or by juxtaposing an impermeable unit, like shale, against a reservoir bed. Faulting may also affect oil migration by providing a highly fractured zone that serves as a fluid conduit through which oil migrates. Lastly, syn-depositional faulting (growth faults) can affect the distribution of oil reservoir units (Chapter 1).
Valuable ore minerals (e.g., gold) commonly occur in veins or are precipitated from hydrothermal fluids that were focused along fault zones, because fracturing provides enhanced permeability. Thus, fault breccias are commonly targets for mineral exploration. As we pointed out earlier, displacement on faults may control the distribution of ore-bearing horizons, and thus mining geologists map faults in a mining area in great detail. Hydrogeologists also are cognizant of faults, because of their effect on the migration of groundwater. A fault zone may act as a permeable zone through which fluids migrate if it contains unfilled fractures, or the fault zone may act as a seal if it has been filled with vein material or includes impermeable gouge. In addition, faults may truncate aquifers, and/or juxtapose an aquitard against an aquifer, thereby blocking fluid migration paths.
Faulting and Earthquakes
The general public often panic when they hear that a fault has been discovered near their home, because of the common perception that all faults eventually slip and cause earthquakes. Faulting is widespread in the crust, but fortunately, most faults are inactive, meaning that they haven’t slipped in a long time, and are probably permanently stuck. Relatively few faults are active, meaning that they have slipped recently or have the potential to slip in the near future. Active faults can be quite damaging, both in human and economic losses (Figure 5.28). Even when slip occurs, not all movement on active faults results in seismicity, however. If an increment of faulting causes an earthquake, we say that the fault is seismic, but if the offset occurs without generating an earthquake, we call the slip aseismic. Aseismic faulting is also called fault creep by seismologists.
|
|
|
FIGURE 5.28. Damage from the Kobe earthquake in 1995 (Japan). [8.35] |

Why do earthquakes occur during movement on faults? Earthquakes represent the sudden release of elastic strain energy that is stored in a rock, and can be generated when an intact rock ruptures, or when asperities on a preexisting fault snap off or suddenly plow. Rubbing two bricks while applying some pressure is a good analogy of this process. The bricks move until the indentation of asperities once again anchors them. This start-stop behavior of faults is called stick-slip behavior (Figure 5.29). During the stick phase, stress builds up (as illustrated by the solid line), while during the slip phase the fault moves and stress at the site of faulting drops (dashed line). Typically, the stress drop is not complete, meaning that the differential stress does not decrease to zero. If we accept this model of faulting, fault creep occurs where a fault zone is very weak, perhaps due to the presence of weak material, hydrolytic weakening in the fault zone, or high fluid pressures in the fault zone.
|
|
FIGURE 5.29. Laboratory frictional sliding experiment on granite, showing stick-slip behavior. The stress drops (dashed lines) correspond to slip events. Associated microfracturing activity is also indicated. [8.36] |

Geoscientists have struggled for decades to delineate regions that have the potential to be seismic. This work involves the study of faults to determine if they are active or inactive, and whether active faults are seismic or aseismic. But fault studies alone do not provide a complete image of seismicity, because not all earthquakes occur on recognized faults. Some represent the development of new faults, some represent slip on blind faults, and some represent non-fault-related seismicity (e.g., volcanic explosions). Delineation of seismically active regions plays a major role in land use planning. Obviously, the potential for seismicity must be taken into account when designing building codes for homes and when situating large public facilities like nuclear power plants, schools, hospitals, dams, and pipelines.
The primary criterion for delineating a seismically active region comes from direct measurements of seismicity. The underlying idea is that places with a potential for earthquakes in the near future probably have suffered earthquakes in the past. Networks of seismographs record earthquakes and provide the data needed to pinpoint the focus of each earthquake; that is, the region in the Earth where the seismic energy was released. Maps of earthquake epicenters (the point on the Earth’s surface that lies directly above the focus) emphasize that most earthquakes occur along plate boundaries, but that dangerous earthquakes may also occur within plate interiors. Thus, we recognize plate boundary seismicity and intraplate seismicity. Cross sections showing the distribution of earthquake foci show that, with the exception of convergent-margin seismicity, most earthquakes occur at depths shallower than ∼15 km, which defines the lower boundary of the brittle upper crust. Convergent margin earthquakes occur along subducted slabs down to depths of about 650 km, defining the Wadati-Benioff zone (see Chapter 13). The deep earthquakes in a Wadati-Benioff zone occur well below the expected depth for brittle faulting. So why do these deep-focus earthquakes occur? One suggestion is that deep-focus earthquakes represent the stress release associated with sudden mineral phase changes in the downgoing slab (e.g., olivine to spinel). Since different mineral phases occupy different volumes, a sudden phase change causes a movement in the rock body that could result in the generation of an earthquake and perhaps even in the formation of pseudotachylyte. The question is not resolved.
A reliable and detailed record of seismicity is only a few decades old, because a worldwide network of seismograph stations was not installed until after World War II. The information from these stations proved critical for the formulation of plate tectonic theory in the 1960s, but governments actually funded this network to monitor underground nuclear testing in the Cold War era of the 1950s. Seismic studies cannot delineate the potential for seismicity in areas that have only infrequent earthquake activity. To identify such cryptic seismic zones, geologists also rely on field data, searching for features such as cross-cutting relations with very young stratigraphic units or landforms, clastic injections, etc. If the fault cuts a very young sequence of sediment or a very young volcanic flow or ash, then the fault must itself be very young. Similarly, if the fault cuts a young landform, like an alluvial fan or a glacial moraine, then the fault must be very young. Fault occurred so recently that erosion has not had time to erase its surface manifestation. The presence of uncemented gouge suggests that a fault was active while the rock was fairly close to the surface, a situation that implies movement on the fault occurred subsequent to uplift and exhumation of rock. The presence of pseudotachylyte may indicate that the fault was seismic. Changes in base level due to faulting at the face of a mountain range can cause a stream to cut down through alluvium that it previously deposited, creating matched terraces on opposite sides of the valley. The development of such paired terraces may indicate the occurrence of seismicity. Finally, accurate surveying of the landscape may indicate otherwise undetectable ground movements that could be a precursor to seismicity.
In some cases, it may be possible to determine the recurrence interval on a fault, meaning the average time between successive faulting events. This is done by studying the detailed stratigraphy of sediments deposited in marshes or ponds along the fault trace. Seismic events are recorded by layers in which sediment has been liquefied by shaking (these features are sometimes called seismites), which causes disruption of bedding and sand volcanoes. By collecting organic material from the liquefied interval (such as wood), it may be possible to date the timing of liquefaction. Once we know the recurrence interval and the size of the earthquakes, we can estimate the seismic risk for that area.
The past few decades have seen intense study of earthquakes and related processes. As a result we have become very successful in predicting where earthquakes will occur (if not precisely, at least the general area), but when they occur remains an imprecise science at best. Typical error margins of 50 or so years are inadequate for our daily lives, but being able to improve significantly on this with our current understanding of earthquake faulting seems unlikely. Geology operates on timescales much larger than human ones, so preparation is our best strategy when it comes to earthquake hazards.
A few handy earthquake calculators:
Basic Seismicity Calculator for Seismic Moment (Mo), Moment Magnitude (Mw) and radiated Seismic Energy.
Earthquake Probability Calculator to determine
Poisson (time-independent) and Gaussian (time-dependent) statistics for future earthquakes with known recurrence interval.
v1.4; Last update 14-sep-23